Ziel dieses Projektes war es, mit Hilfe des schulüblichen Grafiktaschenrechners, einer Messschnittstelle, einer Ultraschallsonde und etwas Elektronik, einen kleinen Roboter zu bauen. Dieser sollte sich autonom z.B. in einem Labyrinth zurecht finden.
Dieses Projekt war eines von drei Projekten, die letztlich zusammen bei Jugend forscht auftraten.
An dem Taschenrechner Roboter haben insgesammt 4 Leute gearbeitet: Sussanne Gedrich, Tom Henschel, Victor Schäfer, und meine wenigkeit.
Von mir stammt die Software und die Elektronikbastelei.
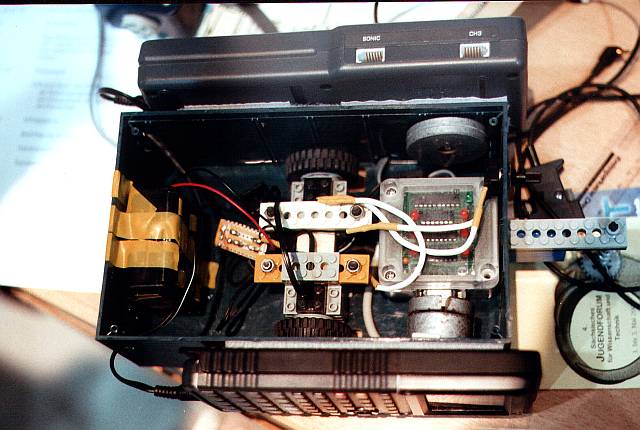
Im Bild rechts, sieht man den offenen Roboter, hinten in der Mitte die Messschnittstell und vorn den Grafiktaschenrechner, links die Ultraschalsonde.


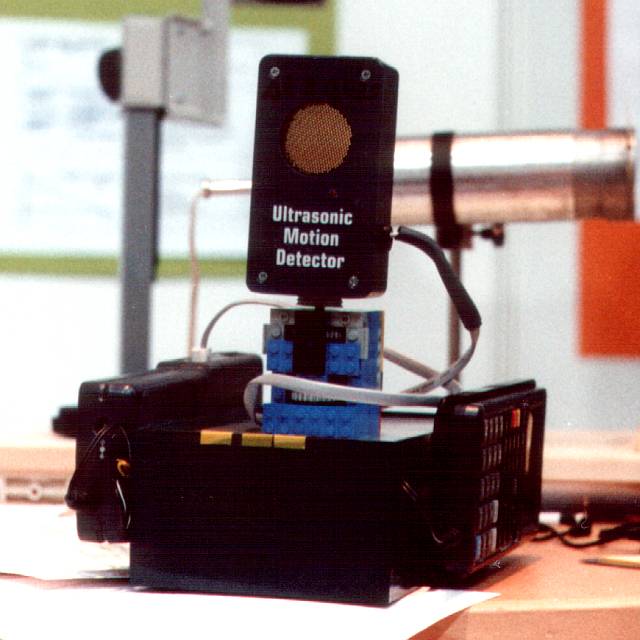
Hier das gute Stück noch mal von der anderen Seite.
Hinten sind Gewichte, da der Roboter sehr frontlastig war. Zur Steuerung wurden zwei Legomotoren eigesetzt, sowie ein weiterer zum drehen der Messonde. Auf diesem Bild sieht man noch einen Drehwiederstand, der dafür sorgen sollte, dass die Motoren gleich schnell laufen. Aufgrund der Technik waren nur folgende Fahrmodi möglich: Stopp, vorwärts, rückwärts, rechts drehen, links drehen.
Hier ein Einblick von oben, recht sieht man den Treibersatz (zum ansteuern der Motoren).
In der Mitte sind die beiden Antriebsmotoren und links das Batterie Pack sowie ein Spannungsregler.