Hierbei handelt es sich um unseren Wettbewerbsroboter, zum 1. Roboterwetbewerb der TU-Dresden 2002.
Von Seiten der TU wurde uns ein Grundbausatz mit C-Control, Motoren, Aluplatte und Elektronikteilen zur Verfügung gestellt. Ebenso erhielten wir die Aufgabenliste, was der Roboter am Ende können muss. Dabei handelte es sich um die Verfolgung einer schwarzen, geschlossenen Linie, dass Aufinden und Aufsammeln von präparierten Filmdosen (IR-Sender) sowei eine Kür freier Wahl.
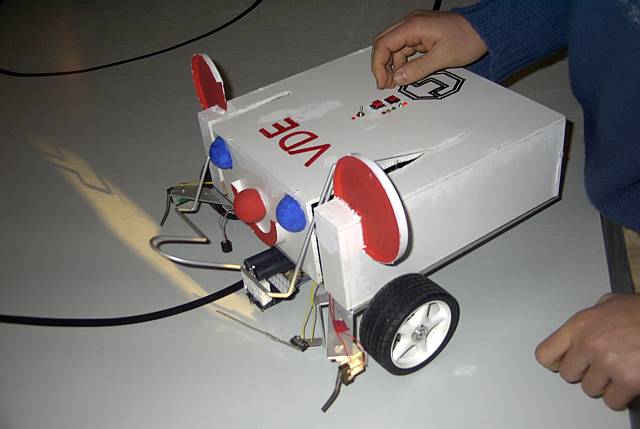
Rechts sieht man unseren Roboter ("Klaus I") in Aktion.
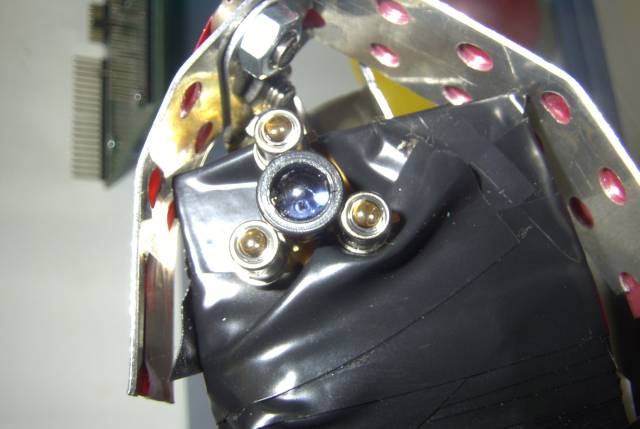
Links sieht man den Liniendetektor, in der Mitte eine IR-LED, rundherum 3 Phototransistoren. Die erste Aufgabe, die Verfolgung der schwarzen Linie konnte damit einwandfrei und schnell gelöst werden :-)
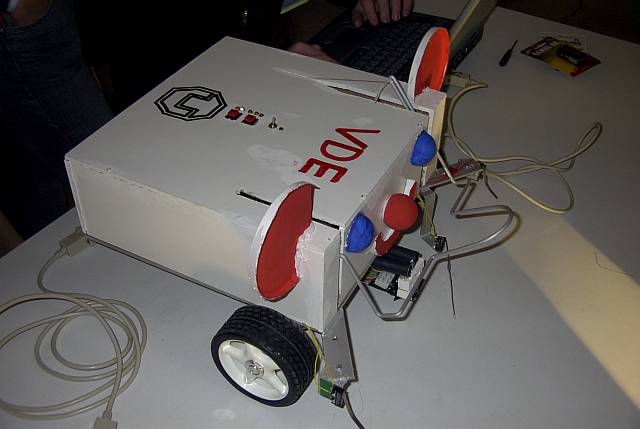
Hier ein weiteres Bild vom fertigen Roboter, man erkennt die Räder, das Gehäuse (ja unser Physiklehrer hate auch einen Hang zur Kunst ;-), am Roboter vorn, rechts und links sind Microschalter zur Kolisionsvermeidung. Desweiteren sieht man die "Fangeinrichtung" für die präperierten Filmdosen. Die beiden schwarzen Röhrchen stellen die Sucheinrichtung für die Filmdosen dar, zwei IR-Sensoren, für gepulste IR Signale (ähnlich einer Fernbedienung)
Oben auf dem Gehäuse, erkennt man die Steuerelemente (Start, Reset, Laden und div. Diagnose LEDs)

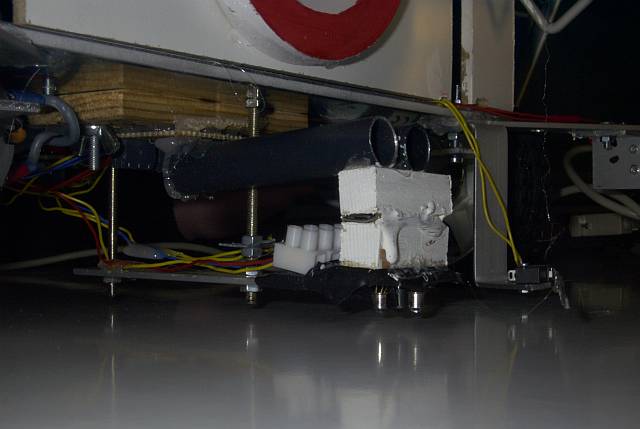
Hier sieht man "Klaus I" offen. Rechts der 12V Akku, links die C-Control auf dem Basic-Board, vorn unten rechts ist ein Microphon-Vorverstärker. Hinten links ein kleiner Motor um die "Fangeinrichtung" zu bewegen.
Wie man unschwer, an dem Chaos erkennen kann ist der großteil der Elektronik von mir ;-)

Das Team: (vlnr) Tom Henschel (Programmierung), Felix Hertschuch (Hardware), Susanne Gedrich (Desingn, Hardware), Markus Funke (Elektronik, z.T. Programmierung)
Der Roboter konnte alle Aufgaben bewältigen, außer der Kür, da versagte er leider kläglich, er sollte mit Hilfe eines Keyboards fern gesteuret werden :-(
Unser Team wurde beim Wettbewerb dritter von insgesammt elf Teams, wobei nur acht zum eigentlichen Wettbewerb angetreten waren.
